2.3. 空间复杂度¶
「空间复杂度 Space Complexity」统计 算法使用内存空间随着数据量变大时的增长趋势。这个概念与时间复杂度很类似。
2.3.1. 算法相关空间¶
算法运行中,使用的内存空间主要有以下几种:
- 「输入空间」用于存储算法的输入数据;
- 「暂存空间」用于存储算法运行中的变量、对象、函数上下文等数据;
- 「输出空间」用于存储算法的输出数据;
Tip
通常情况下,空间复杂度统计范围是「暂存空间」+「输出空间」。
暂存空间可分为三个部分:
- 「暂存数据」用于保存算法运行中的各种 常量、变量、对象 等。
- 「栈帧空间」用于保存调用函数的上下文数据。系统每次调用函数都会在栈的顶部创建一个栈帧,函数返回时,栈帧空间会被释放。
- 「指令空间」用于保存编译后的程序指令,在实际统计中一般忽略不计。

Fig. 算法使用的相关空间
/* 类 */
class Node {
int val;
Node next;
Node(int x) { val = x; }
}
/* 函数 */
int function() {
// do something...
return 0;
}
int algorithm(int n) { // 输入数据
final int a = 0; // 暂存数据(常量)
int b = 0; // 暂存数据(变量)
Node node = new Node(0); // 暂存数据(对象)
int c = function(); // 栈帧空间(调用函数)
return a + b + c; // 输出数据
}
/* 结构体 */
struct Node {
int val;
Node *next;
Node(int x) : val(x), next(nullptr) {}
};
/* 函数 */
int func() {
// do something...
return 0;
}
int algorithm(int n) { // 输入数据
const int a = 0; // 暂存数据(常量)
int b = 0; // 暂存数据(变量)
Node* node = new Node(0); // 暂存数据(对象)
int c = func(); // 栈帧空间(调用函数)
return a + b + c; // 输出数据
}
""" 类 """
class Node:
def __init__(self, x: int):
self.val: int = x # 结点值
self.next: Optional[Node] = None # 指向下一结点的指针(引用)
""" 函数 """
def function() -> int:
# do something...
return 0
def algorithm(n) -> int: # 输入数据
A: int = 0 # 暂存数据(常量,一般用大写字母表示)
b: int = 0 # 暂存数据(变量)
node = Node(0) # 暂存数据(对象)
c: int = function() # 栈帧空间(调用函数)
return A + b + c # 输出数据
/* 结构体 */
type node struct {
val int
next *node
}
/* 创建 node 结构体 */
func newNode(val int) *node {
return &node{val: val}
}
/* 函数 */
func function() int {
// do something...
return 0
}
func algorithm(n int) int { // 输入数据
const a = 0 // 暂存数据(常量)
b := 0 // 暂存数据(变量)
newNode(0) // 暂存数据(对象)
c := function() // 栈帧空间(调用函数)
return a + b + c // 输出数据
}
/* 类 */
class Node {
val;
next;
constructor(val) {
this.val = val === undefined ? 0 : val; // 结点值
this.next = null; // 指向下一结点的引用
}
}
/* 函数 */
function constFunc() {
// do something
return 0;
}
function algorithm(n) { // 输入数据
const a = 0; // 暂存数据(常量)
let b = 0; // 暂存数据(变量)
const node = new Node(0); // 暂存数据(对象)
const c = constFunc(); // 栈帧空间(调用函数)
return a + b + c; // 输出数据
}
/* 类 */
class Node {
val: number;
next: Node | null;
constructor(val?: number) {
this.val = val === undefined ? 0 : val; // 结点值
this.next = null; // 指向下一结点的引用
}
}
/* 函数 */
function constFunc(): number {
// do something
return 0;
}
function algorithm(n: number): number { // 输入数据
const a = 0; // 暂存数据(常量)
let b = 0; // 暂存数据(变量)
const node = new Node(0); // 暂存数据(对象)
const c = constFunc(); // 栈帧空间(调用函数)
return a + b + c; // 输出数据
}
/* 类 */
class Node
{
int val;
Node next;
Node(int x) { val = x; }
}
/* 函数 */
int function()
{
// do something...
return 0;
}
int algorithm(int n) // 输入数据
{
const int a = 0; // 暂存数据(常量)
int b = 0; // 暂存数据(变量)
Node node = new Node(0); // 暂存数据(对象)
int c = function(); // 栈帧空间(调用函数)
return a + b + c; // 输出数据
}
/* 类 */
class Node {
var val: Int
var next: Node?
init(x: Int) {
val = x
}
}
/* 函数 */
func function() -> Int {
// do something...
return 0
}
func algorithm(n: Int) -> Int { // 输入数据
let a = 0 // 暂存数据(常量)
var b = 0 // 暂存数据(变量)
let node = Node(x: 0) // 暂存数据(对象)
let c = function() // 栈帧空间(调用函数)
return a + b + c // 输出数据
}
2.3.2. 推算方法¶
空间复杂度的推算方法和时间复杂度总体类似,只是从统计“计算操作数量”变为统计“使用空间大小”。与时间复杂度不同的是,我们一般只关注「最差空间复杂度」。这是因为内存空间是一个硬性要求,我们必须保证在所有输入数据下都有足够的内存空间预留。
最差空间复杂度中的“最差”有两层含义,分别为输入数据的最差分布、算法运行中的最差时间点。
- 以最差输入数据为准。当 \(n < 10\) 时,空间复杂度为 \(O(1)\) ;但是当 \(n > 10\) 时,初始化的数组
nums使用 \(O(n)\) 空间;因此最差空间复杂度为 \(O(n)\) ; - 以算法运行过程中的峰值内存为准。程序在执行最后一行之前,使用 \(O(1)\) 空间;当初始化数组
nums时,程序使用 \(O(n)\) 空间;因此最差空间复杂度为 \(O(n)\) ;
在递归函数中,需要注意统计栈帧空间。例如函数 loop(),在循环中调用了 \(n\) 次 function() ,每轮中的 function() 都返回并释放了栈帧空间,因此空间复杂度仍为 \(O(1)\) 。而递归函数 recur() 在运行中会同时存在 \(n\) 个未返回的 recur() ,从而使用 \(O(n)\) 的栈帧空间。
2.3.3. 常见类型¶
设输入数据大小为 \(n\) ,常见的空间复杂度类型有(从低到高排列)

Fig. 空间复杂度的常见类型
Tip
部分示例代码需要一些前置知识,包括数组、链表、二叉树、递归算法等。如果遇到看不懂的地方无需担心,可以在学习完后面章节后再来复习,现阶段先聚焦在理解空间复杂度含义和推算方法上。
常数阶 \(O(1)\)¶
常数阶常见于数量与输入数据大小 \(n\) 无关的常量、变量、对象。
需要注意的是,在循环中初始化变量或调用函数而占用的内存,在进入下一循环后就会被释放,即不会累积占用空间,空间复杂度仍为 \(O(1)\) 。
/* 常数阶 */
func spaceConstant(n int) {
// 常量、变量、对象占用 O(1) 空间
const a = 0
b := 0
nums := make([]int, 10000)
ListNode := newNode(0)
// 循环中的变量占用 O(1) 空间
var c int
for i := 0; i < n; i++ {
c = 0
}
// 循环中的函数占用 O(1) 空间
for i := 0; i < n; i++ {
function()
}
fmt.Println(a, b, nums, c, ListNode)
}
/* 常数阶 */
function constant(n: number): void {
// 常量、变量、对象占用 O(1) 空间
const a = 0;
const b = 0;
const nums = new Array(10000);
const node = new ListNode(0);
// 循环中的变量占用 O(1) 空间
for (let i = 0; i < n; i++) {
const c = 0;
}
// 循环中的函数占用 O(1) 空间
for (let i = 0; i < n; i++) {
constFunc();
}
}
// 常数阶
fn constant(n: i32) void {
// 常量、变量、对象占用 O(1) 空间
const a: i32 = 0;
var b: i32 = 0;
var nums = [_]i32{0}**10000;
var node = inc.ListNode(i32){.val = 0};
var i: i32 = 0;
// 循环中的变量占用 O(1) 空间
while (i < n) : (i += 1) {
var c: i32 = 0;
_ = c;
}
// 循环中的函数占用 O(1) 空间
i = 0;
while (i < n) : (i += 1) {
_ = function();
}
_ = a;
_ = b;
_ = nums;
_ = node;
}
线性阶 \(O(n)\)¶
线性阶常见于元素数量与 \(n\) 成正比的数组、链表、栈、队列等。
/* 线性阶 */
void linear(int n) {
// 长度为 n 的数组占用 O(n) 空间
int[] nums = new int[n];
// 长度为 n 的列表占用 O(n) 空间
List<ListNode> nodes = new ArrayList<>();
for (int i = 0; i < n; i++) {
nodes.add(new ListNode(i));
}
// 长度为 n 的哈希表占用 O(n) 空间
Map<Integer, String> map = new HashMap<>();
for (int i = 0; i < n; i++) {
map.put(i, String.valueOf(i));
}
}
/* 线性阶 */
void linear(int n) {
// 长度为 n 的数组占用 O(n) 空间
vector<int> nums(n);
// 长度为 n 的列表占用 O(n) 空间
vector<ListNode> nodes;
for (int i = 0; i < n; i++) {
nodes.push_back(ListNode(i));
}
// 长度为 n 的哈希表占用 O(n) 空间
unordered_map<int, string> map;
for (int i = 0; i < n; i++) {
map[i] = to_string(i);
}
}
/* 线性阶 */
func spaceLinear(n int) {
// 长度为 n 的数组占用 O(n) 空间
_ = make([]int, n)
// 长度为 n 的列表占用 O(n) 空间
var nodes []*node
for i := 0; i < n; i++ {
nodes = append(nodes, newNode(i))
}
// 长度为 n 的哈希表占用 O(n) 空间
m := make(map[int]string, n)
for i := 0; i < n; i++ {
m[i] = strconv.Itoa(i)
}
}
/* 线性阶 */
function linear(n) {
// 长度为 n 的数组占用 O(n) 空间
const nums = new Array(n);
// 长度为 n 的列表占用 O(n) 空间
const nodes = [];
for (let i = 0; i < n; i++) {
nodes.push(new ListNode(i));
}
// 长度为 n 的哈希表占用 O(n) 空间
const map = new Map();
for (let i = 0; i < n; i++) {
map.set(i, i.toString());
}
}
/* 线性阶 */
function linear(n: number): void {
// 长度为 n 的数组占用 O(n) 空间
const nums = new Array(n);
// 长度为 n 的列表占用 O(n) 空间
const nodes: ListNode[] = [];
for (let i = 0; i < n; i++) {
nodes.push(new ListNode(i));
}
// 长度为 n 的哈希表占用 O(n) 空间
const map = new Map();
for (let i = 0; i < n; i++) {
map.set(i, i.toString());
}
}
/* 线性阶 */
void linear(int n)
{
// 长度为 n 的数组占用 O(n) 空间
int[] nums = new int[n];
// 长度为 n 的列表占用 O(n) 空间
List<ListNode> nodes = new();
for (int i = 0; i < n; i++)
{
nodes.Add(new ListNode(i));
}
// 长度为 n 的哈希表占用 O(n) 空间
Dictionary<int, String> map = new();
for (int i = 0; i < n; i++)
{
map.Add(i, i.ToString());
}
}
// 线性阶
fn linear(comptime n: i32) !void {
// 长度为 n 的数组占用 O(n) 空间
var nums = [_]i32{0}**n;
// 长度为 n 的列表占用 O(n) 空间
var nodes = std.ArrayList(i32).init(std.heap.page_allocator);
defer nodes.deinit();
var i: i32 = 0;
while (i < n) : (i += 1) {
try nodes.append(i);
}
// 长度为 n 的哈希表占用 O(n) 空间
var map = std.AutoArrayHashMap(i32, []const u8).init(std.heap.page_allocator);
defer map.deinit();
var j: i32 = 0;
while (j < n) : (j += 1) {
const string = try std.fmt.allocPrint(std.heap.page_allocator, "{d}", .{j});
defer std.heap.page_allocator.free(string);
try map.put(i, string);
}
_ = nums;
}
以下递归函数会同时存在 \(n\) 个未返回的 algorithm() 函数,使用 \(O(n)\) 大小的栈帧空间。
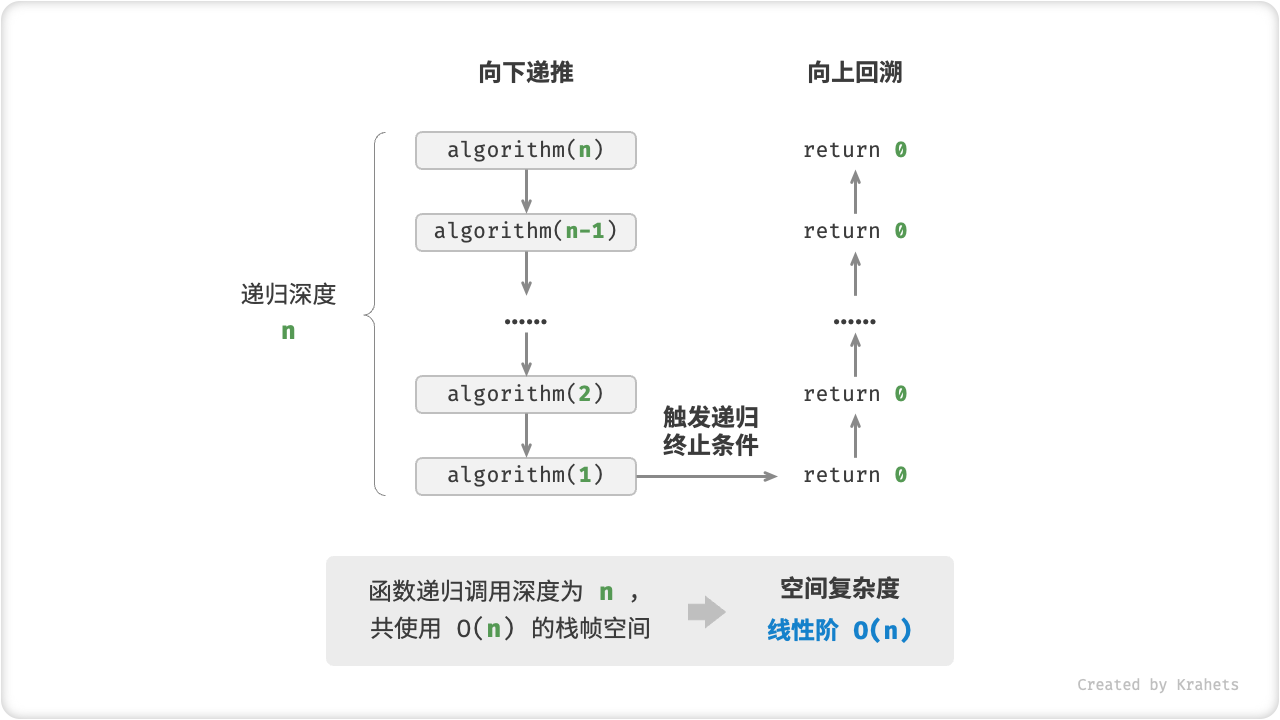
Fig. 递归函数产生的线性阶空间复杂度
平方阶 \(O(n^2)\)¶
平方阶常见于元素数量与 \(n\) 成平方关系的矩阵、图。
/* 平方阶 */
void quadratic(int n) {
// 矩阵占用 O(n^2) 空间
int[][] numMatrix = new int[n][n];
// 二维列表占用 O(n^2) 空间
List<List<Integer>> numList = new ArrayList<>();
for (int i = 0; i < n; i++) {
List<Integer> tmp = new ArrayList<>();
for (int j = 0; j < n; j++) {
tmp.add(0);
}
numList.add(tmp);
}
}
/* 平方阶 */
function quadratic(n: number): void {
// 矩阵占用 O(n^2) 空间
const numMatrix = Array(n)
.fill(null)
.map(() => Array(n).fill(null));
// 二维列表占用 O(n^2) 空间
const numList = [];
for (let i = 0; i < n; i++) {
const tmp = [];
for (let j = 0; j < n; j++) {
tmp.push(0);
}
numList.push(tmp);
}
}
// 平方阶
fn quadratic(n: i32) !void {
// 二维列表占用 O(n^2) 空间
var nodes = std.ArrayList(std.ArrayList(i32)).init(std.heap.page_allocator);
defer nodes.deinit();
var i: i32 = 0;
while (i < n) : (i += 1) {
var tmp = std.ArrayList(i32).init(std.heap.page_allocator);
defer tmp.deinit();
var j: i32 = 0;
while (j < n) : (j += 1) {
try tmp.append(0);
}
try nodes.append(tmp);
}
}
在以下递归函数中,同时存在 \(n\) 个未返回的 algorithm() ,并且每个函数中都初始化了一个数组,长度分别为 \(n, n-1, n-2, ..., 2, 1\) ,平均长度为 \(\frac{n}{2}\) ,因此总体使用 \(O(n^2)\) 空间。
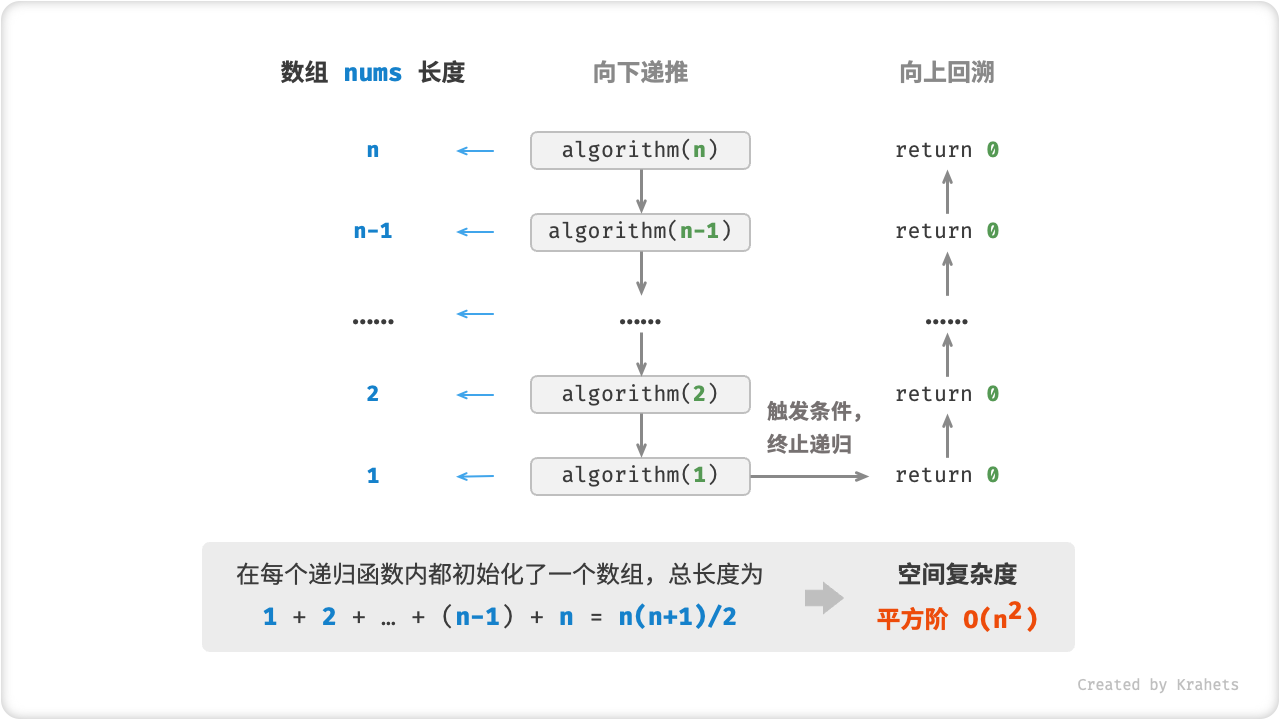
Fig. 递归函数产生的平方阶空间复杂度
指数阶 \(O(2^n)\)¶
指数阶常见于二叉树。高度为 \(n\) 的「满二叉树」的结点数量为 \(2^n - 1\) ,使用 \(O(2^n)\) 空间。
// 指数阶(建立满二叉树)
fn buildTree(mem_allocator: std.mem.Allocator, n: i32) !?*inc.TreeNode(i32) {
if (n == 0) return null;
const root = try mem_allocator.create(inc.TreeNode(i32));
root.init(0);
root.left = try buildTree(mem_allocator, n - 1);
root.right = try buildTree(mem_allocator, n - 1);
return root;
}
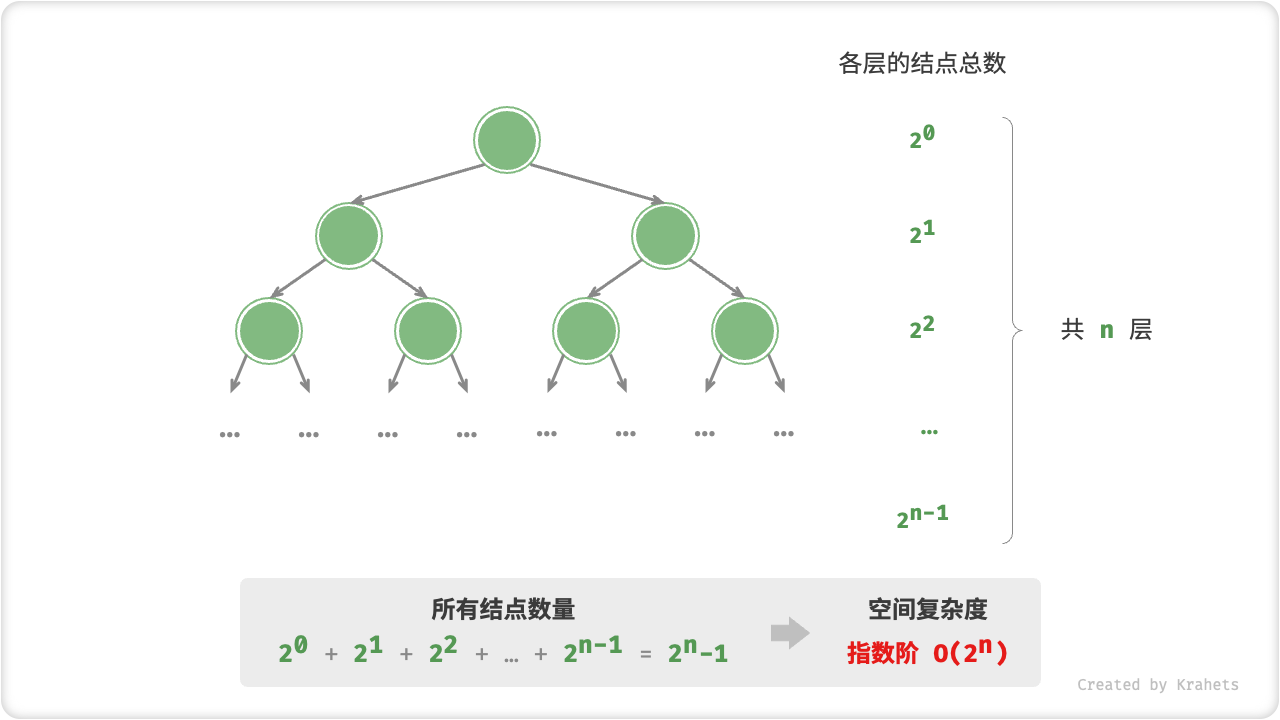
Fig. 满二叉树产生的指数阶空间复杂度
对数阶 \(O(\log n)\)¶
对数阶常见于分治算法、数据类型转换等。
例如「归并排序」,长度为 \(n\) 的数组可以形成高度为 \(\log n\) 的递归树,因此空间复杂度为 \(O(\log n)\) 。
再例如「数字转化为字符串」,输入任意正整数 \(n\) ,它的位数为 \(\log_{10} n\) ,即对应字符串长度为 \(\log_{10} n\) ,因此空间复杂度为 \(O(\log_{10} n) = O(\log n)\) 。