7.2 KiB
0-1 背包問題
背包問題是一個非常好的動態規劃入門題目,是動態規劃中最常見的問題形式。其具有很多變種,例如 0-1 背包問題、完全背包問題、多重背包問題等。
在本節中,我們先來求解最常見的 0-1 背包問題。
!!! question
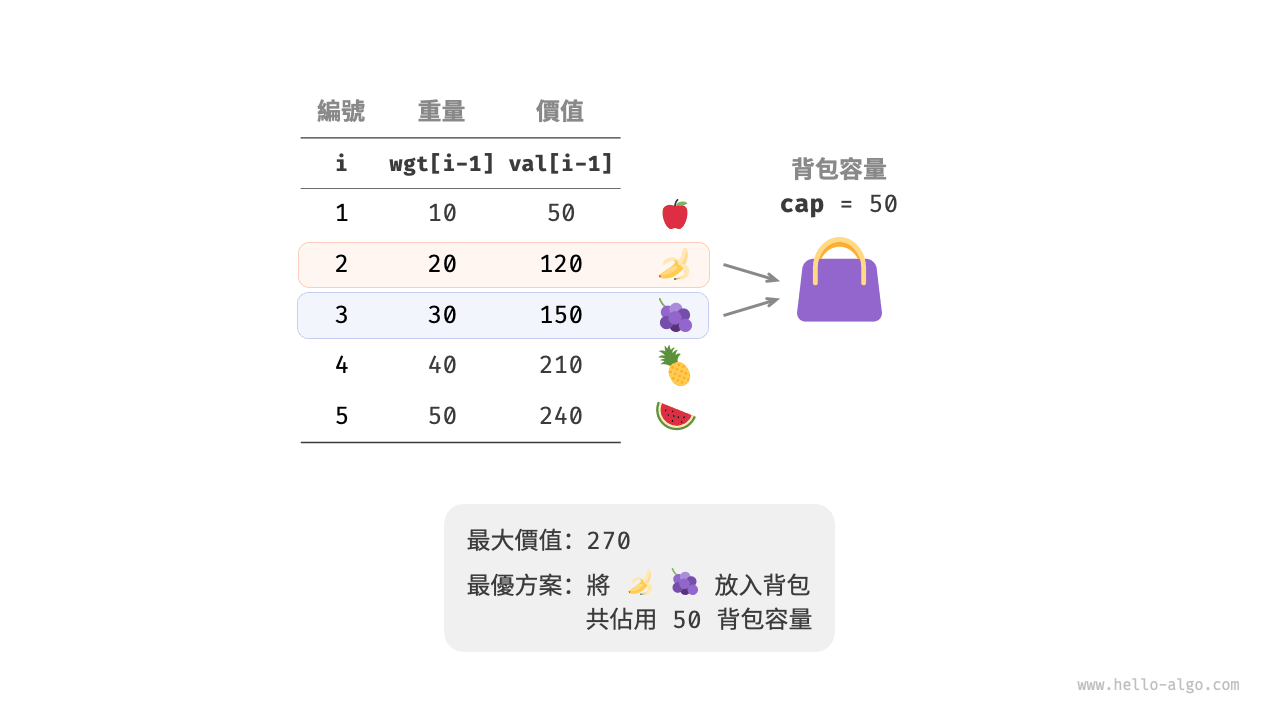
給定 $n$ 個物品,第 $i$ 個物品的重量為 $wgt[i-1]$、價值為 $val[i-1]$ ,和一個容量為 $cap$ 的背包。每個物品只能選擇一次,問在限定背包容量下能放入物品的最大價值。
觀察下圖,由於物品編號 i 從 1 開始計數,陣列索引從 0 開始計數,因此物品 i 對應重量 wgt[i-1] 和價值 val[i-1] 。
我們可以將 0-1 背包問題看作一個由 n 輪決策組成的過程,對於每個物體都有不放入和放入兩種決策,因此該問題滿足決策樹模型。
該問題的目標是求解“在限定背包容量下能放入物品的最大價值”,因此較大機率是一個動態規劃問題。
第一步:思考每輪的決策,定義狀態,從而得到 dp 表
對於每個物品來說,不放入背包,背包容量不變;放入背包,背包容量減小。由此可得狀態定義:當前物品編號 i 和背包容量 c ,記為 [i, c] 。
狀態 [i, c] 對應的子問題為:前 i 個物品在容量為 c 的背包中的最大價值,記為 dp[i, c] 。
待求解的是 dp[n, cap] ,因此需要一個尺寸為 (n+1) \times (cap+1) 的二維 dp 表。
第二步:找出最優子結構,進而推導出狀態轉移方程
當我們做出物品 i 的決策後,剩餘的是前 i-1 個物品決策的子問題,可分為以下兩種情況。
- 不放入物品
i:背包容量不變,狀態變化為[i-1, c]。 - 放入物品
i:背包容量減少wgt[i-1],價值增加val[i-1],狀態變化為[i-1, c-wgt[i-1]]。
上述分析向我們揭示了本題的最優子結構:最大價值 dp[i, c] 等於不放入物品 i 和放入物品 i 兩種方案中價值更大的那一個。由此可推導出狀態轉移方程:
dp[i, c] = \max(dp[i-1, c], dp[i-1, c - wgt[i-1]] + val[i-1])
需要注意的是,若當前物品重量 wgt[i - 1] 超出剩餘背包容量 c ,則只能選擇不放入背包。
第三步:確定邊界條件和狀態轉移順序
當無物品或背包容量為 0 時最大價值為 0 ,即首列 dp[i, 0] 和首行 dp[0, c] 都等於 0 。
當前狀態 [i, c] 從上方的狀態 [i-1, c] 和左上方的狀態 [i-1, c-wgt[i-1]] 轉移而來,因此透過兩層迴圈正序走訪整個 dp 表即可。
根據以上分析,我們接下來按順序實現暴力搜尋、記憶化搜尋、動態規劃解法。
方法一:暴力搜尋
搜尋程式碼包含以下要素。
- 遞迴參數:狀態
[i, c]。 - 返回值:子問題的解
dp[i, c]。 - 終止條件:當物品編號越界
i = 0或背包剩餘容量為0時,終止遞迴並返回價值0。 - 剪枝:若當前物品重量超出背包剩餘容量,則只能選擇不放入背包。
[file]{knapsack}-[class]{}-[func]{knapsack_dfs}
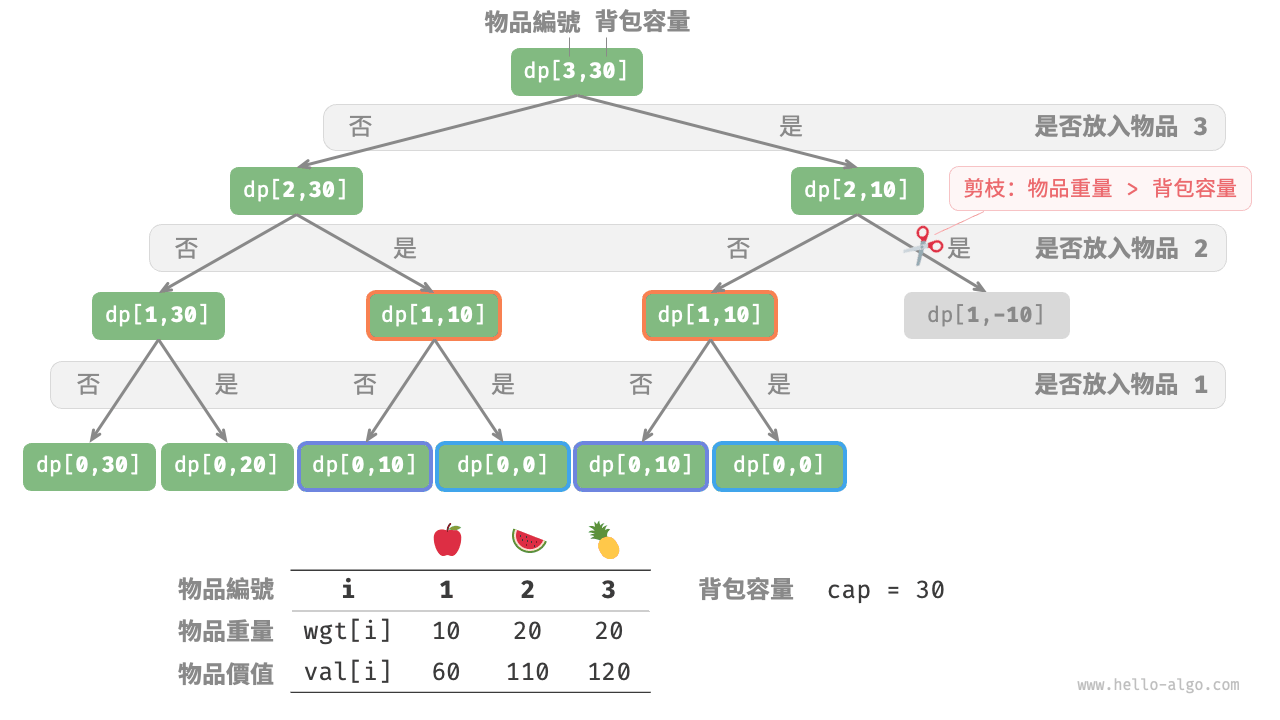
如下圖所示,由於每個物品都會產生不選和選兩條搜尋分支,因此時間複雜度為 O(2^n) 。
觀察遞迴樹,容易發現其中存在重疊子問題,例如 dp[1, 10] 等。而當物品較多、背包容量較大,尤其是相同重量的物品較多時,重疊子問題的數量將會大幅增多。
方法二:記憶化搜尋
為了保證重疊子問題只被計算一次,我們藉助記憶串列 mem 來記錄子問題的解,其中 mem[i][c] 對應 dp[i, c] 。
引入記憶化之後,時間複雜度取決於子問題數量,也就是 O(n \times cap) 。實現程式碼如下:
[file]{knapsack}-[class]{}-[func]{knapsack_dfs_mem}
下圖展示了在記憶化搜尋中被剪掉的搜尋分支。

方法三:動態規劃
動態規劃實質上就是在狀態轉移中填充 dp 表的過程,程式碼如下所示:
[file]{knapsack}-[class]{}-[func]{knapsack_dp}
如下圖所示,時間複雜度和空間複雜度都由陣列 dp 大小決定,即 O(n \times cap) 。
=== "<1>"

=== "<2>"

=== "<3>"

=== "<4>"

=== "<5>"

=== "<6>"

=== "<7>"

=== "<8>"

=== "<9>"

=== "<10>"

=== "<11>"

=== "<12>"

=== "<13>"

=== "<14>"

空間最佳化
由於每個狀態都只與其上一行的狀態有關,因此我們可以使用兩個陣列滾動前進,將空間複雜度從 O(n^2) 降至 O(n) 。
進一步思考,我們能否僅用一個陣列實現空間最佳化呢?觀察可知,每個狀態都是由正上方或左上方的格子轉移過來的。假設只有一個陣列,當開始走訪第 i 行時,該陣列儲存的仍然是第 i-1 行的狀態。
- 如果採取正序走訪,那麼走訪到
dp[i, j]時,左上方dp[i-1, 1]~dp[i-1, j-1]值可能已經被覆蓋,此時就無法得到正確的狀態轉移結果。 - 如果採取倒序走訪,則不會發生覆蓋問題,狀態轉移可以正確進行。
下圖展示了在單個陣列下從第 i = 1 行轉換至第 i = 2 行的過程。請思考正序走訪和倒序走訪的區別。
=== "<1>"

=== "<2>"

=== "<3>"

=== "<4>"

=== "<5>"

=== "<6>"

在程式碼實現中,我們僅需將陣列 dp 的第一維 i 直接刪除,並且把內迴圈更改為倒序走訪即可:
[file]{knapsack}-[class]{}-[func]{knapsack_dp_comp}