11 KiB
0-1 背包问题
背包问题是一个非常好的动态规划入门题目,是动态规划中最常见的问题形式。其具有很多变种,例如 0-1 背包问题、完全背包问题、多重背包问题等。
在本节中,我们先来求解最常见的 0-1 背包问题。
!!! question
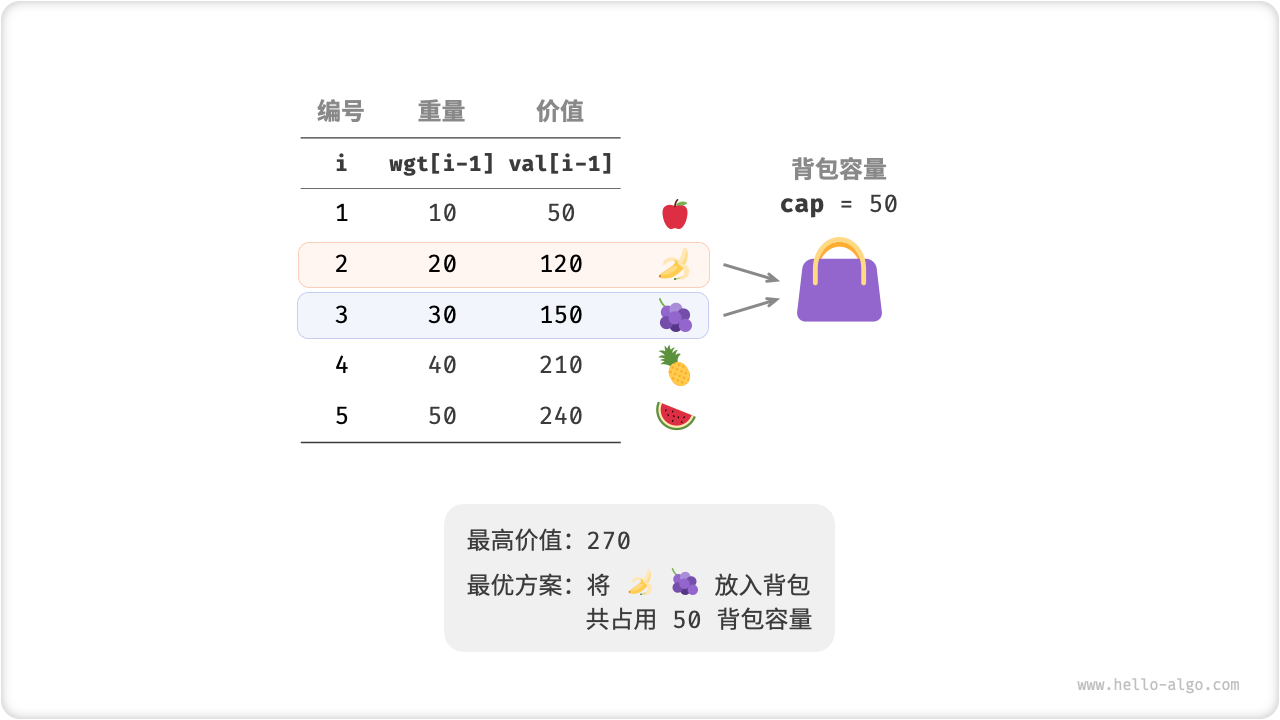
给定 $n$ 个物品,第 $i$ 个物品的重量为 $wgt[i-1]$、价值为 $val[i-1]$ ,和一个容量为 $cap$ 的背包。每个物品只能选择一次,问在不超过背包容量下能放入物品的最大价值。
观察下图,由于物品编号 i 从 1 开始计数,数组索引从 0 开始计数,因此物品 i 对应重量 wgt[i-1] 和价值 val[i-1] 。
我们可以将 0-1 背包问题看作是一个由 n 轮决策组成的过程,每个物体都有不放入和放入两种决策,因此该问题是满足决策树模型的。
该问题的目标是求解“在限定背包容量下的最大价值”,因此较大概率是个动态规划问题。
第一步:思考每轮的决策,定义状态,从而得到 dp 表
对于每个物品来说,不放入背包,背包容量不变;放入背包,背包容量减小。由此可得状态定义:当前物品编号 i 和剩余背包容量 c ,记为 [i, c] 。
状态 [i, c] 对应的子问题为:前 i 个物品在剩余容量为 c 的背包中的最大价值,记为 dp[i, c] 。
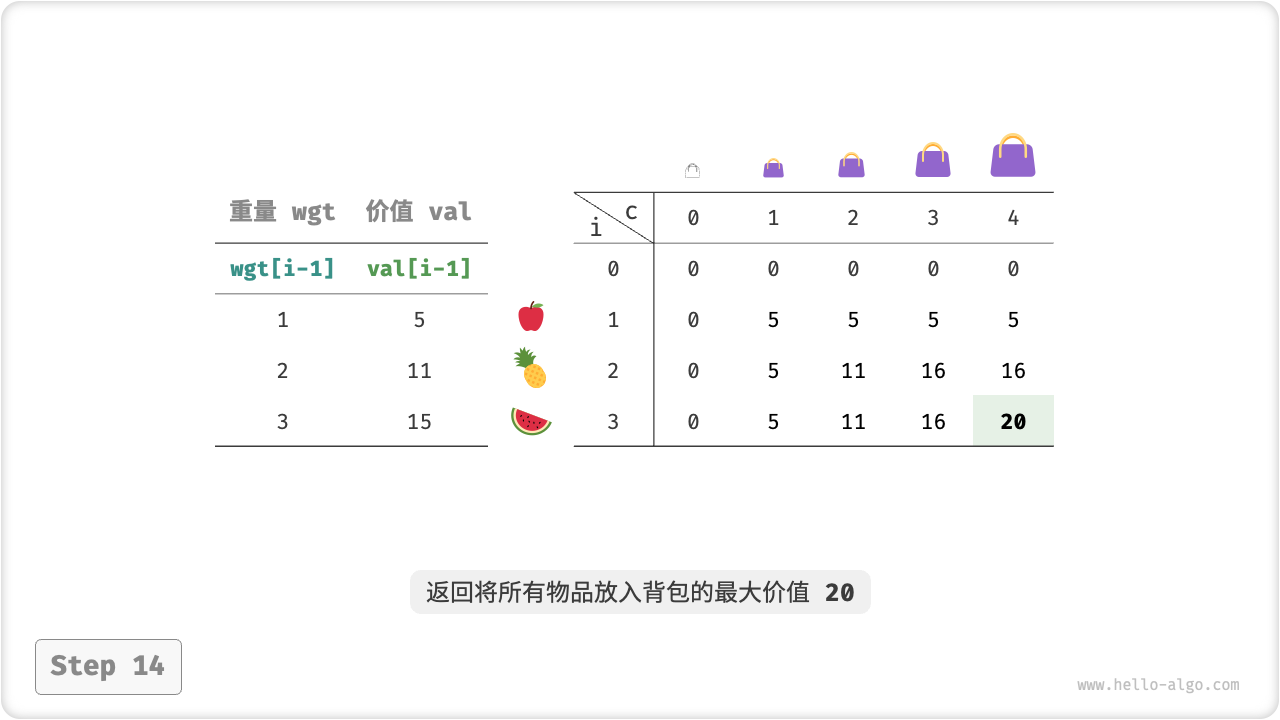
待求解的是 dp[n, cap] ,因此需要一个尺寸为 (n+1) \times (cap+1) 的二维 dp 表。
第二步:找出最优子结构,进而推导出状态转移方程
当我们做出物品 i 的决策后,剩余的是前 i-1 个物品的决策,可分为以下两种情况。
- 不放入物品
i:背包容量不变,状态变化为[i-1, c]。 - 放入物品
i:背包容量减小wgt[i-1],价值增加val[i-1],状态变化为[i-1, c-wgt[i-1]]。
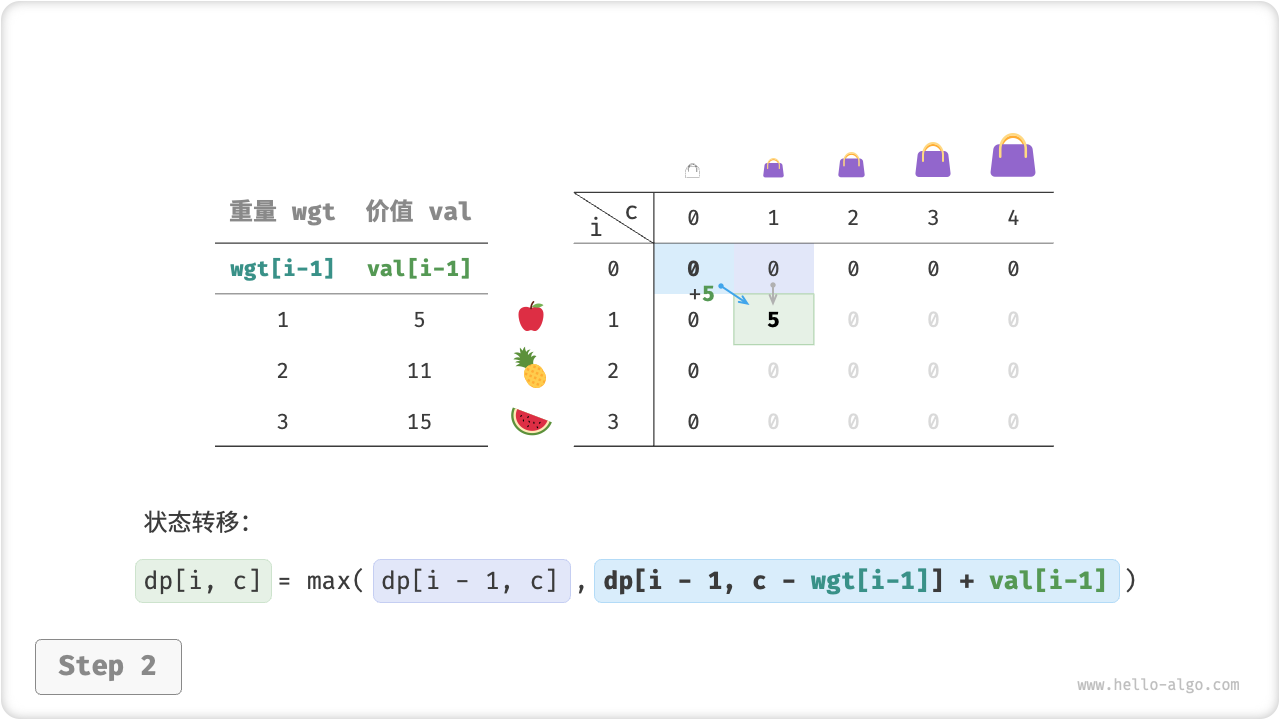
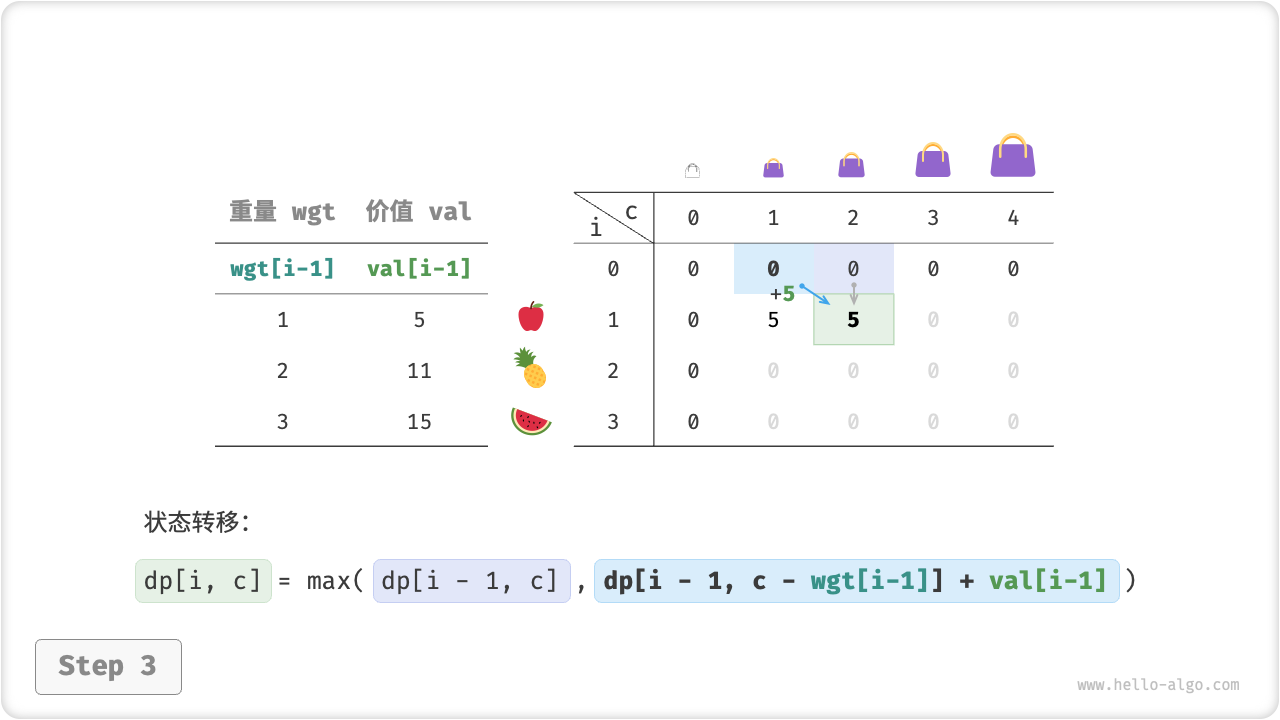
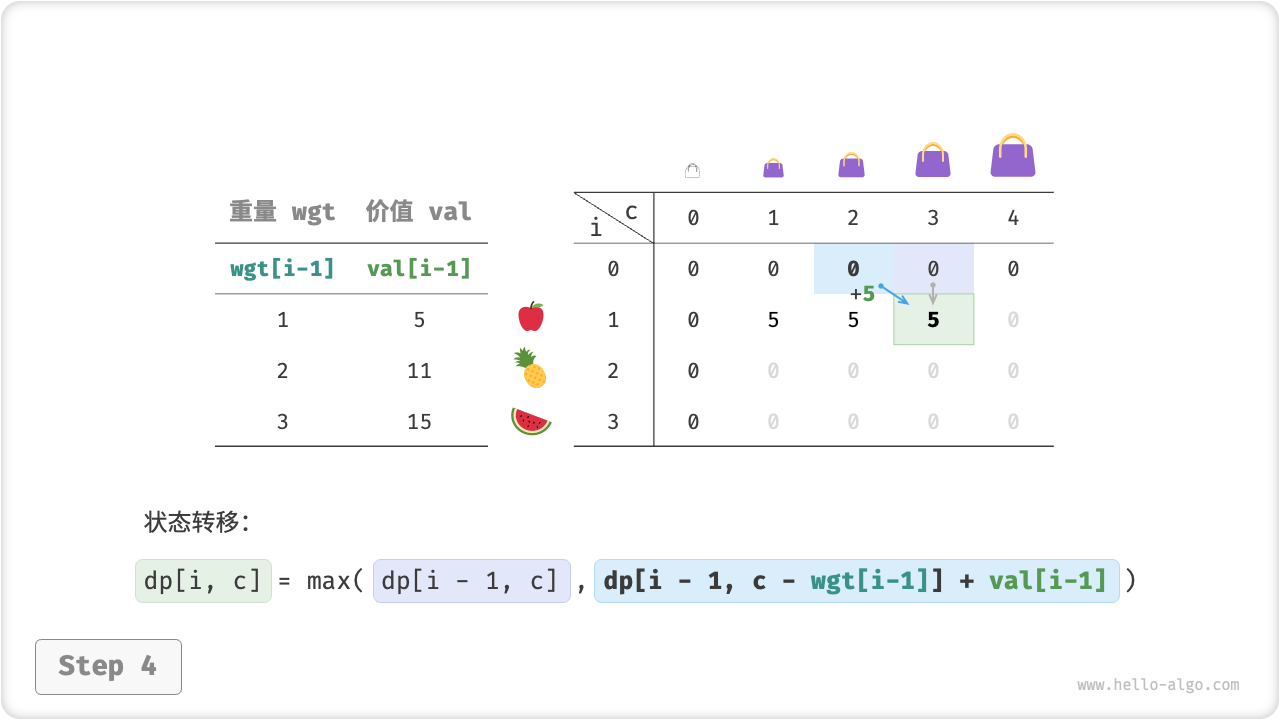
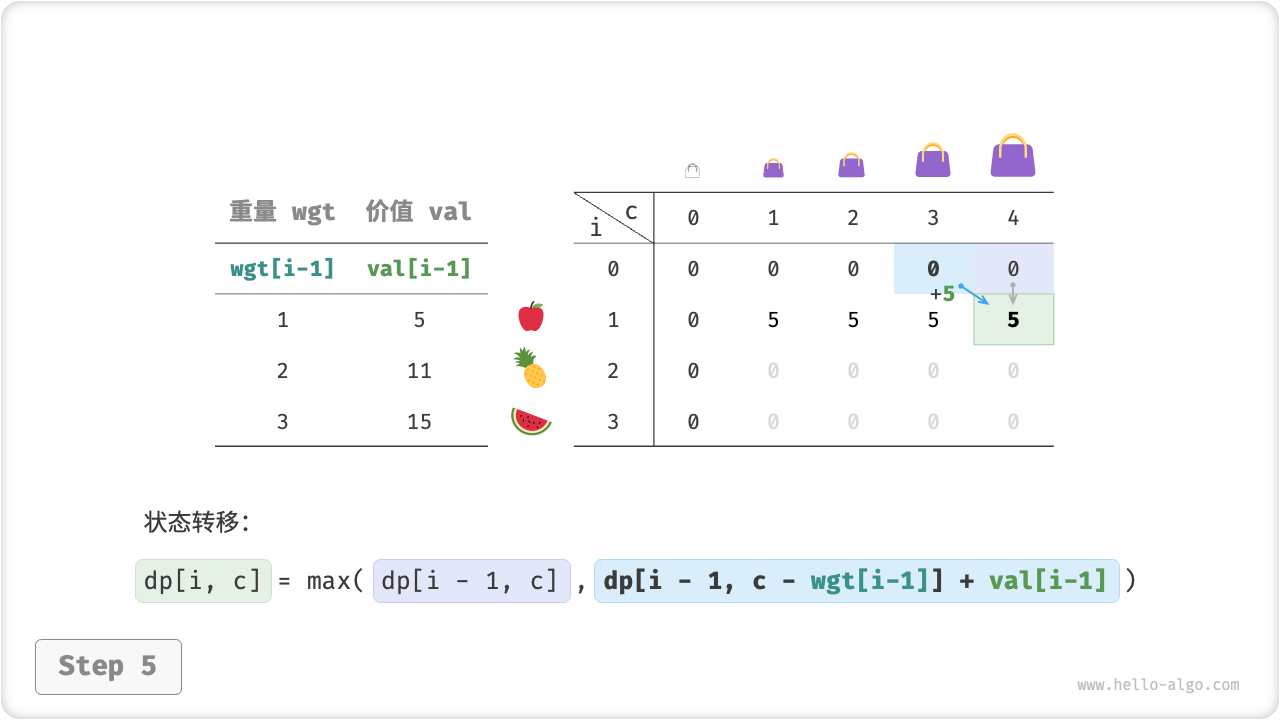
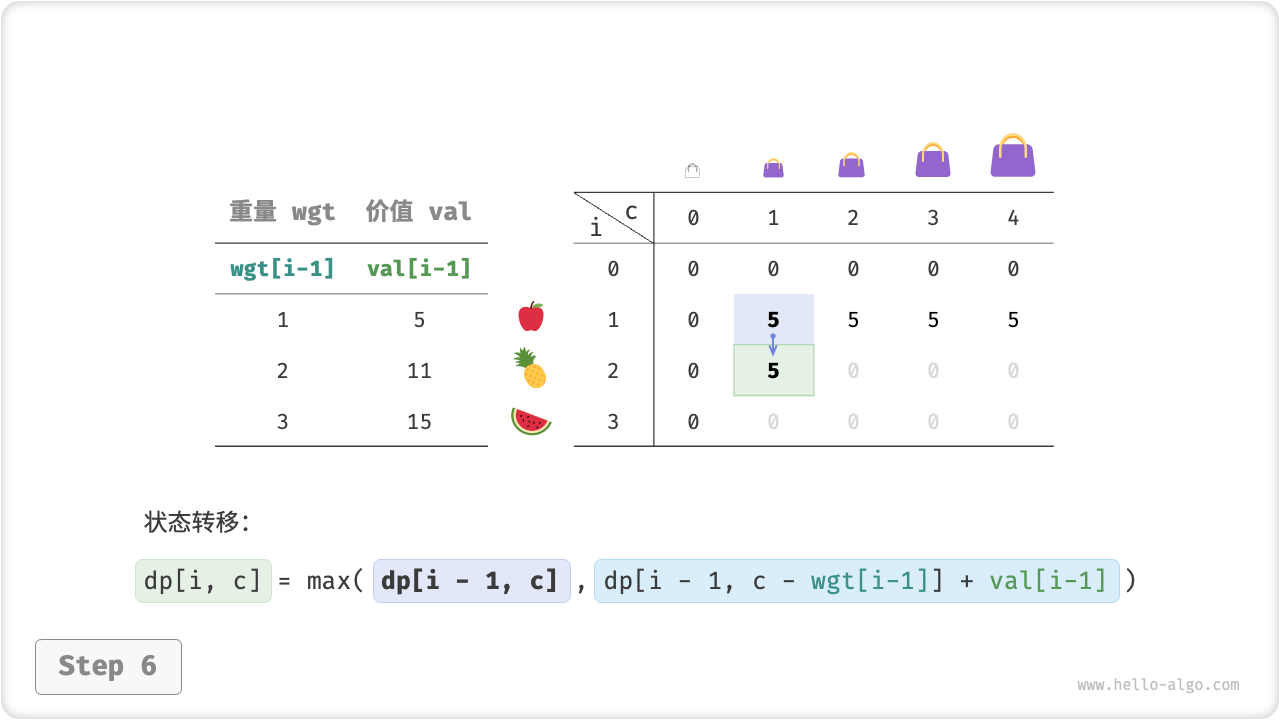
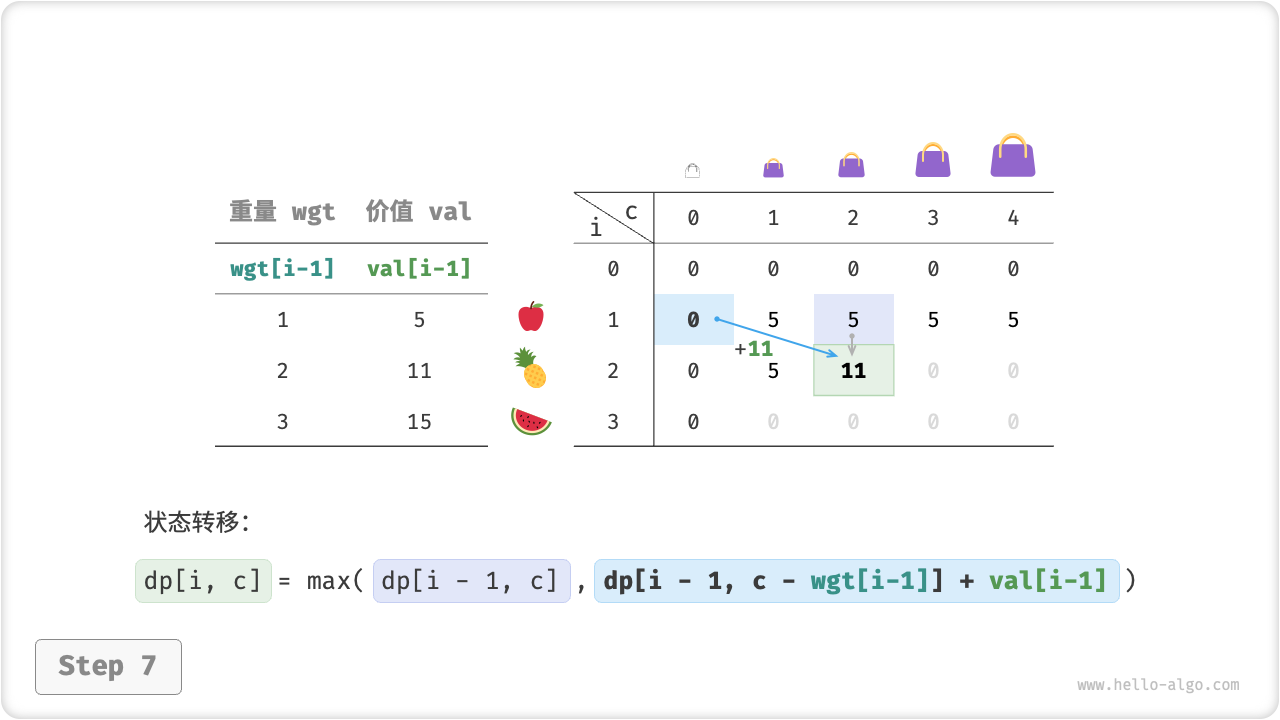
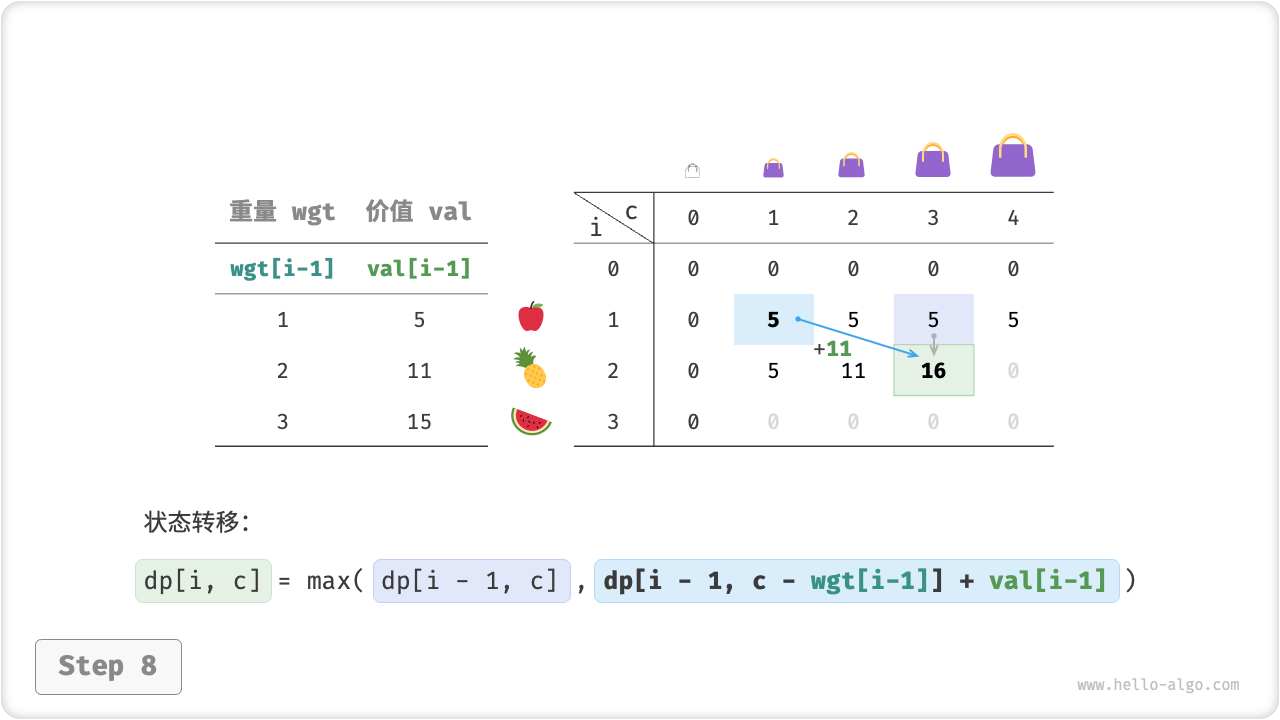
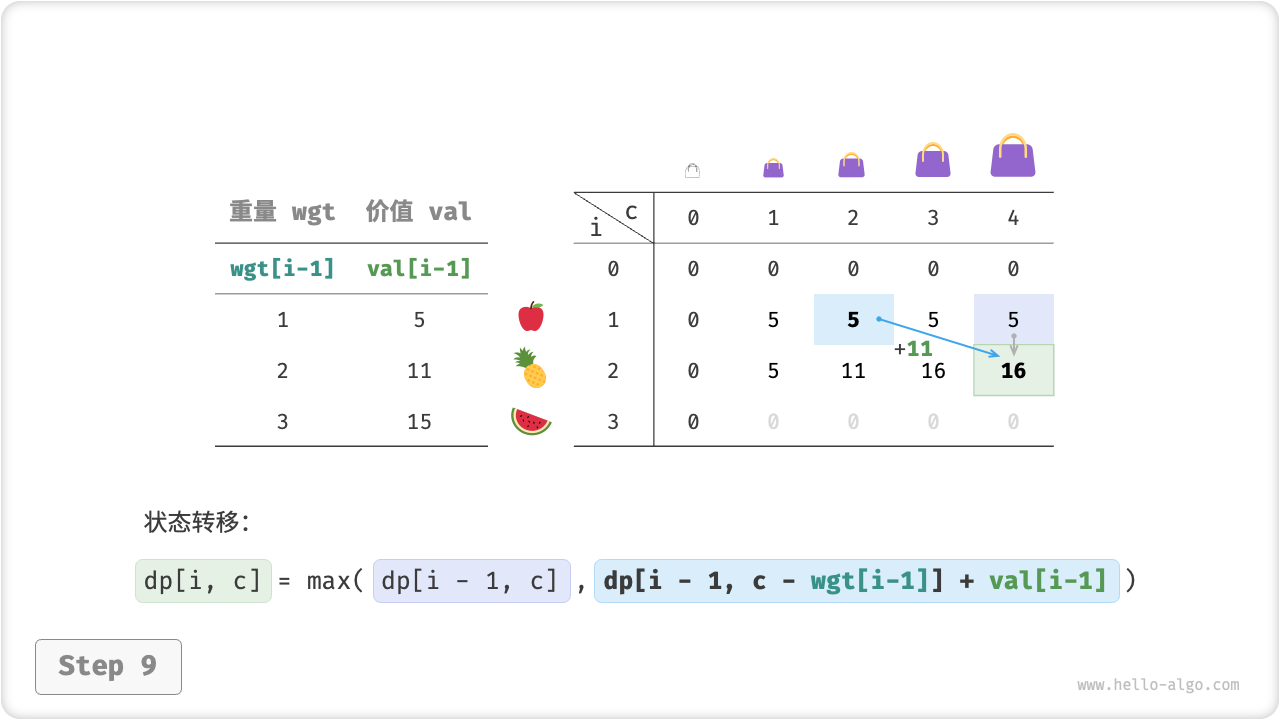
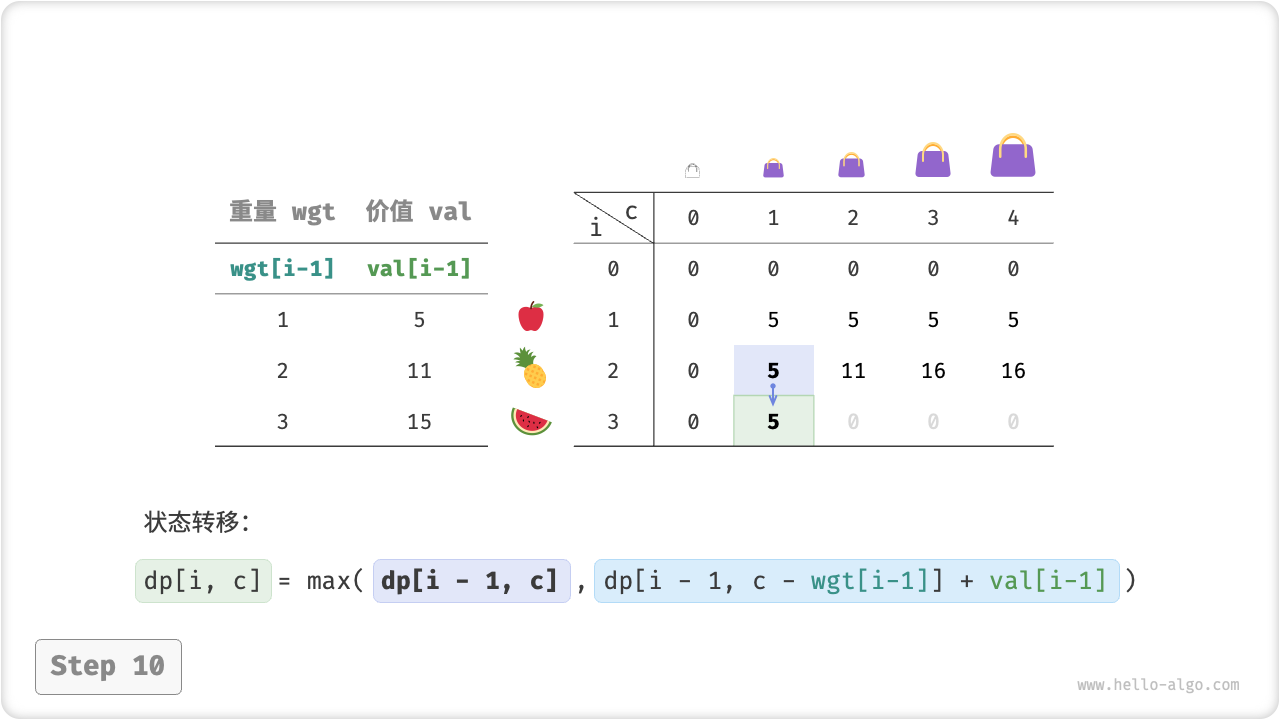
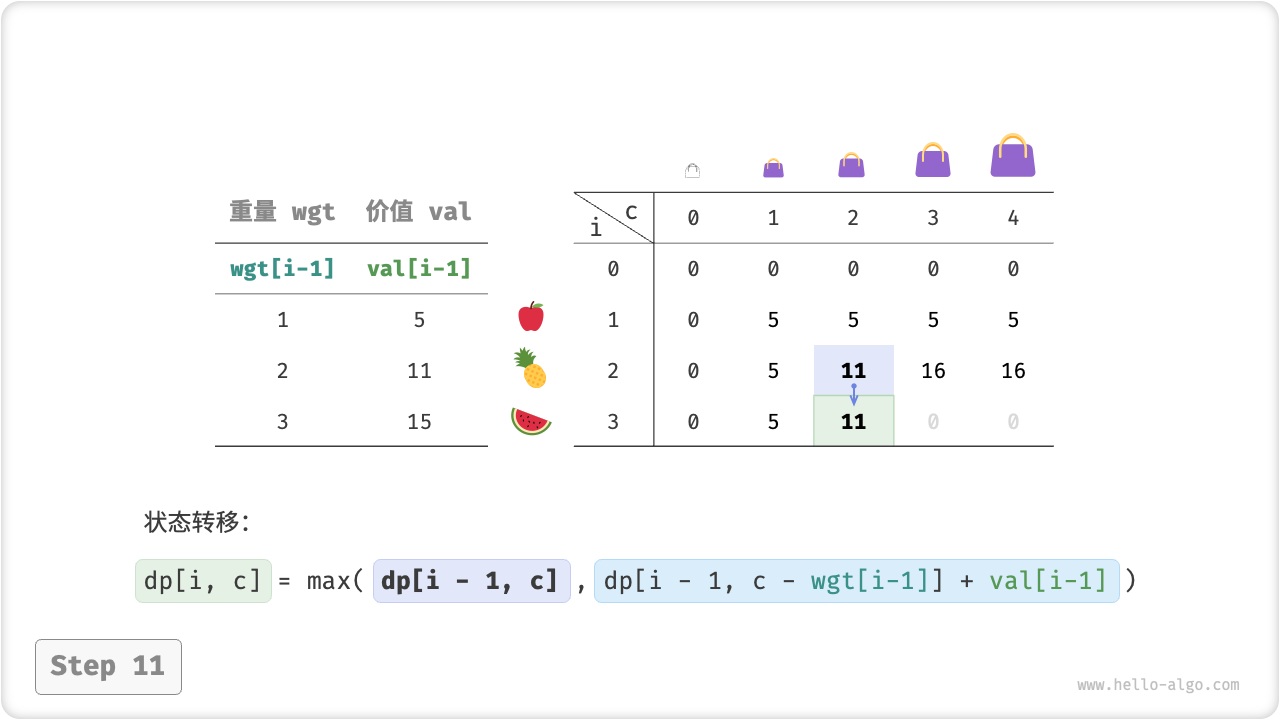
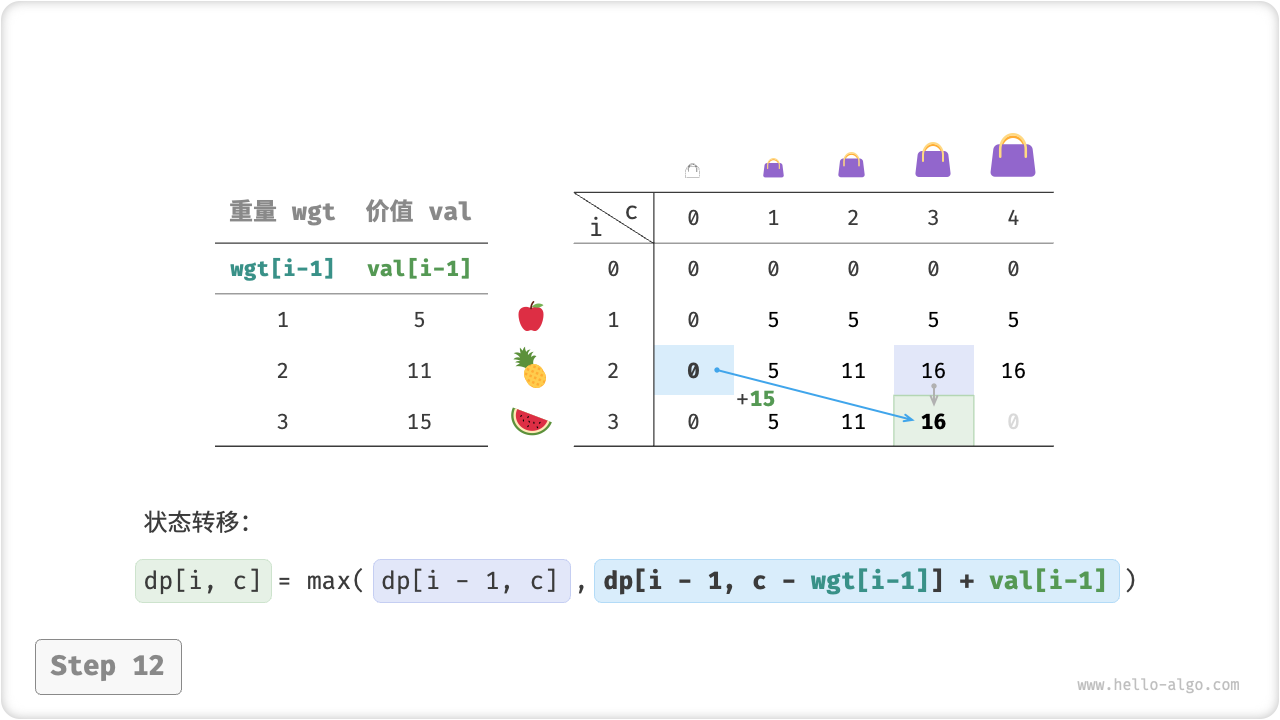
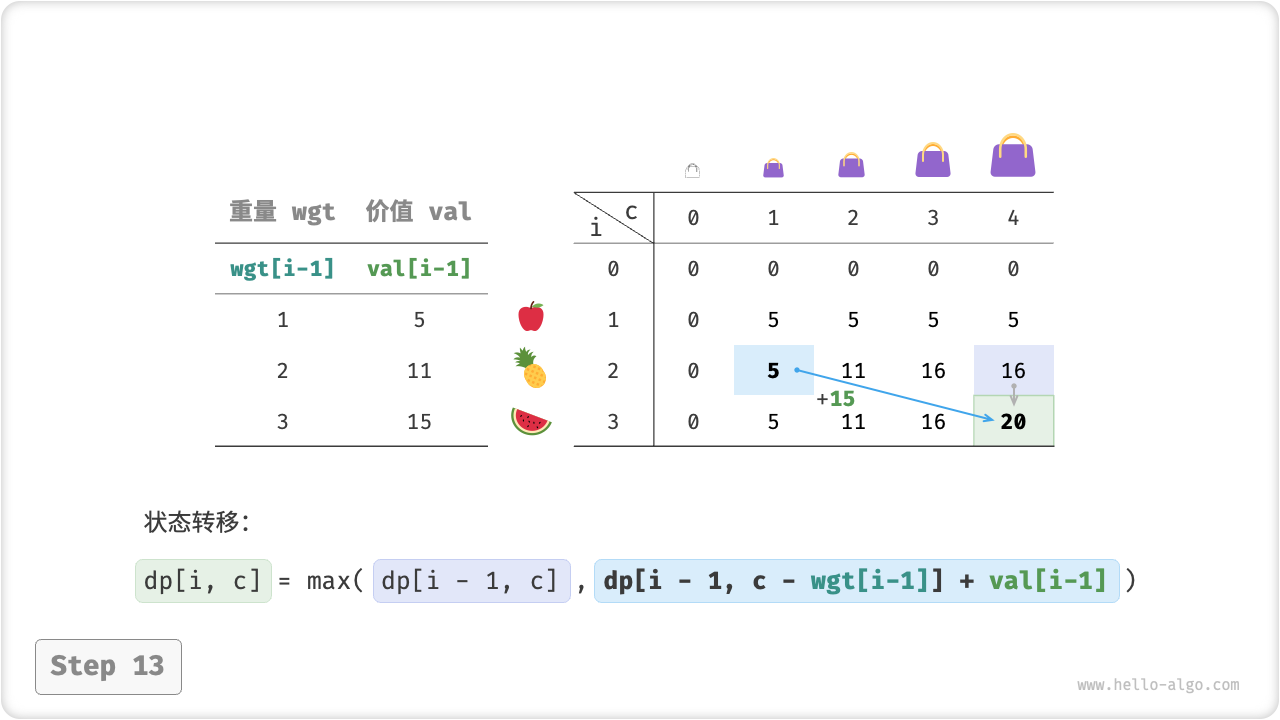
上述分析向我们揭示了本题的最优子结构:最大价值 dp[i, c] 等于不放入物品 i 和放入物品 i 两种方案中的价值更大的那一个。由此可推出状态转移方程:
dp[i, c] = \max(dp[i-1, c], dp[i-1, c - wgt[i-1]] + val[i-1])
需要注意的是,若当前物品重量 wgt[i - 1] 超出剩余背包容量 c ,则只能选择不放入背包。
第三步:确定边界条件和状态转移顺序
当无物品或无剩余背包容量时最大价值为 0 ,即首列 dp[i, 0] 和首行 dp[0, c] 都等于 0 。
当前状态 [i, c] 从上方的状态 [i-1, c] 和左上方的状态 [i-1, c-wgt[i-1]] 转移而来,因此通过两层循环正序遍历整个 dp 表即可。
根据以上分析,我们接下来按顺序实现暴力搜索、记忆化搜索、动态规划解法。
方法一:暴力搜索
搜索代码包含以下要素。
- 递归参数:状态
[i, c]。 - 返回值:子问题的解
dp[i, c]。 - 终止条件:当物品编号越界
i = 0或背包剩余容量为0时,终止递归并返回价值0。 - 剪枝:若当前物品重量超出背包剩余容量,则只能不放入背包。
=== "Java"
```java title="knapsack.java"
[class]{knapsack}-[func]{knapsackDFS}
```
=== "C++"
```cpp title="knapsack.cpp"
[class]{}-[func]{knapsackDFS}
```
=== "Python"
```python title="knapsack.py"
[class]{}-[func]{knapsack_dfs}
```
=== "Go"
```go title="knapsack.go"
[class]{}-[func]{knapsackDFS}
```
=== "JS"
```javascript title="knapsack.js"
[class]{}-[func]{knapsackDFS}
```
=== "TS"
```typescript title="knapsack.ts"
[class]{}-[func]{knapsackDFS}
```
=== "C"
```c title="knapsack.c"
[class]{}-[func]{knapsackDFS}
```
=== "C#"
```csharp title="knapsack.cs"
[class]{knapsack}-[func]{knapsackDFS}
```
=== "Swift"
```swift title="knapsack.swift"
[class]{}-[func]{knapsackDFS}
```
=== "Zig"
```zig title="knapsack.zig"
[class]{}-[func]{knapsackDFS}
```
=== "Dart"
```dart title="knapsack.dart"
[class]{}-[func]{knapsackDFS}
```
=== "Rust"
```rust title="knapsack.rs"
[class]{}-[func]{knapsack_dfs}
```
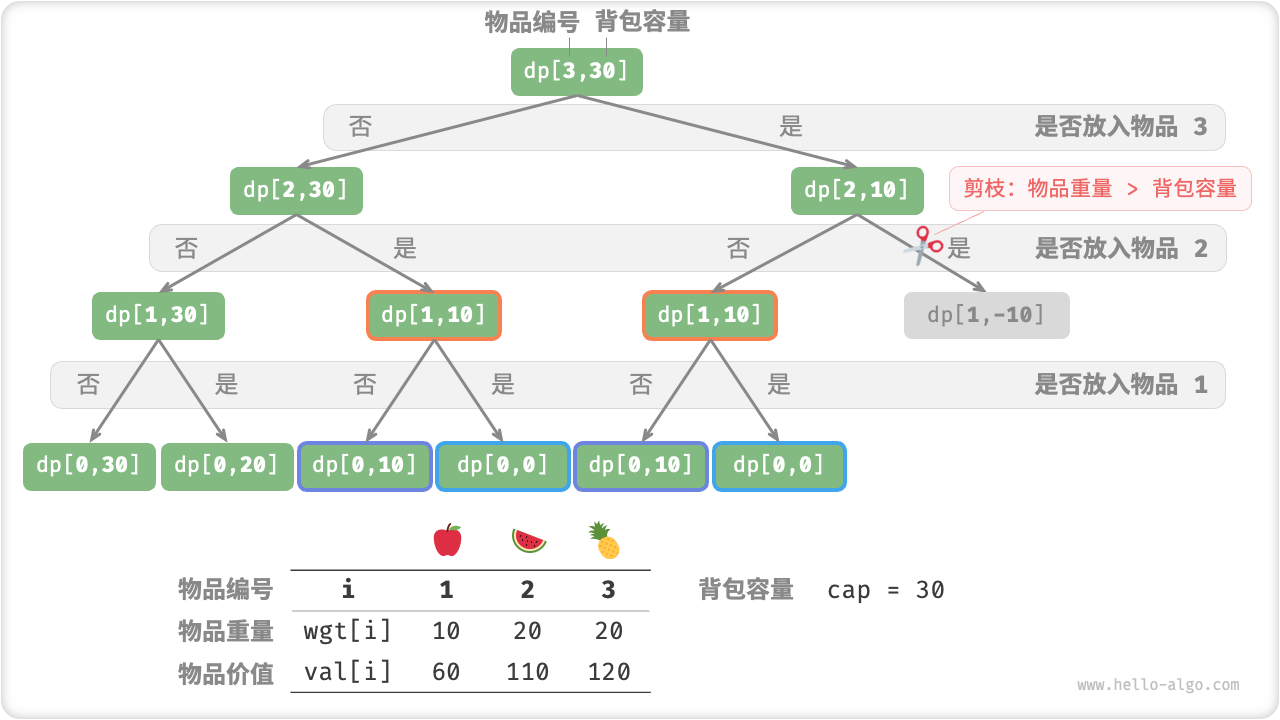
如下图所示,由于每个物品都会产生不选和选两条搜索分支,因此时间复杂度为 O(2^n) 。
观察递归树,容易发现其中存在重叠子问题,例如 dp[1, 10] 等。而当物品较多、背包容量较大,尤其是相同重量的物品较多时,重叠子问题的数量将会大幅增多。
方法二:记忆化搜索
为了保证重叠子问题只被计算一次,我们借助记忆列表 mem 来记录子问题的解,其中 mem[i][c] 对应 dp[i, c] 。
引入记忆化之后,时间复杂度取决于子问题数量,也就是 O(n \times cap) 。
=== "Java"
```java title="knapsack.java"
[class]{knapsack}-[func]{knapsackDFSMem}
```
=== "C++"
```cpp title="knapsack.cpp"
[class]{}-[func]{knapsackDFSMem}
```
=== "Python"
```python title="knapsack.py"
[class]{}-[func]{knapsack_dfs_mem}
```
=== "Go"
```go title="knapsack.go"
[class]{}-[func]{knapsackDFSMem}
```
=== "JS"
```javascript title="knapsack.js"
[class]{}-[func]{knapsackDFSMem}
```
=== "TS"
```typescript title="knapsack.ts"
[class]{}-[func]{knapsackDFSMem}
```
=== "C"
```c title="knapsack.c"
[class]{}-[func]{knapsackDFSMem}
```
=== "C#"
```csharp title="knapsack.cs"
[class]{knapsack}-[func]{knapsackDFSMem}
```
=== "Swift"
```swift title="knapsack.swift"
[class]{}-[func]{knapsackDFSMem}
```
=== "Zig"
```zig title="knapsack.zig"
[class]{}-[func]{knapsackDFSMem}
```
=== "Dart"
```dart title="knapsack.dart"
[class]{}-[func]{knapsackDFSMem}
```
=== "Rust"
```rust title="knapsack.rs"
[class]{}-[func]{knapsack_dfs_mem}
```
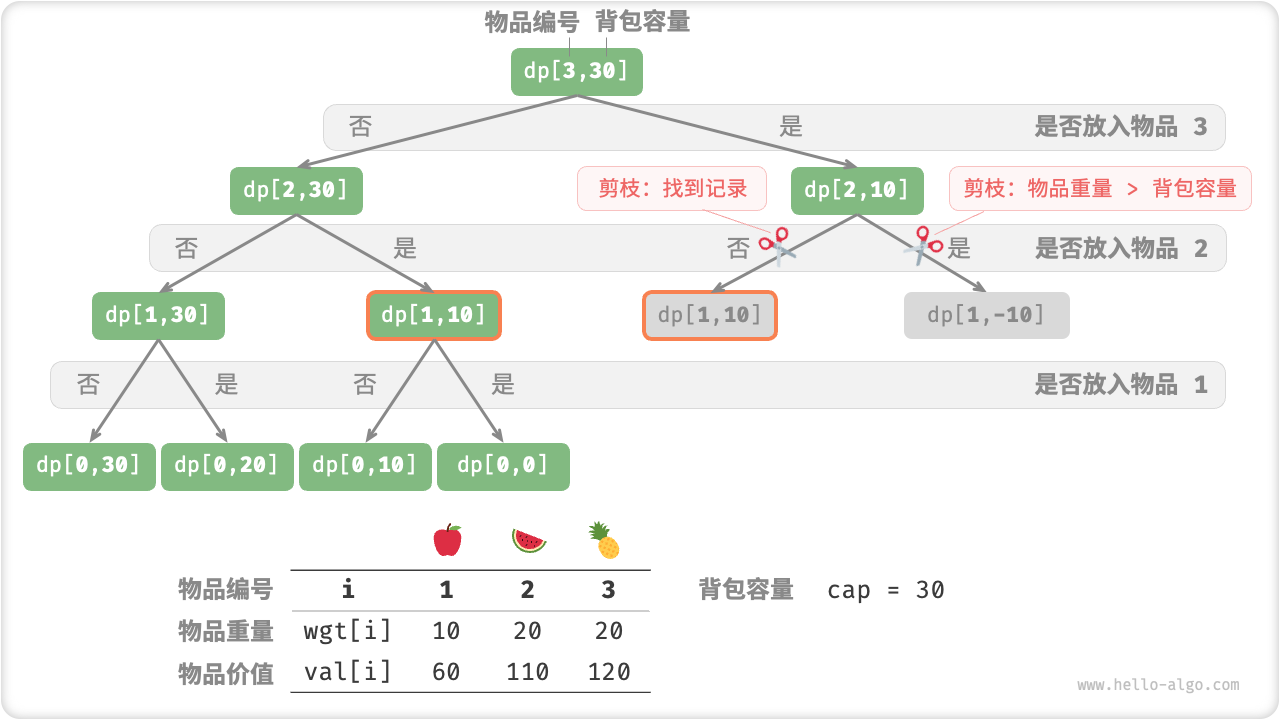
下图展示了在记忆化递归中被剪掉的搜索分支。
方法三:动态规划
动态规划实质上就是在状态转移中填充 dp 表的过程,代码如下所示。
=== "Java"
```java title="knapsack.java"
[class]{knapsack}-[func]{knapsackDP}
```
=== "C++"
```cpp title="knapsack.cpp"
[class]{}-[func]{knapsackDP}
```
=== "Python"
```python title="knapsack.py"
[class]{}-[func]{knapsack_dp}
```
=== "Go"
```go title="knapsack.go"
[class]{}-[func]{knapsackDP}
```
=== "JS"
```javascript title="knapsack.js"
[class]{}-[func]{knapsackDP}
```
=== "TS"
```typescript title="knapsack.ts"
[class]{}-[func]{knapsackDP}
```
=== "C"
```c title="knapsack.c"
[class]{}-[func]{knapsackDP}
```
=== "C#"
```csharp title="knapsack.cs"
[class]{knapsack}-[func]{knapsackDP}
```
=== "Swift"
```swift title="knapsack.swift"
[class]{}-[func]{knapsackDP}
```
=== "Zig"
```zig title="knapsack.zig"
[class]{}-[func]{knapsackDP}
```
=== "Dart"
```dart title="knapsack.dart"
[class]{}-[func]{knapsackDP}
```
=== "Rust"
```rust title="knapsack.rs"
[class]{}-[func]{knapsack_dp}
```
如下图所示,时间复杂度和空间复杂度都由数组 dp 大小决定,即 O(n \times cap) 。
=== "<1>"

=== "<2>"
=== "<3>"
=== "<4>"
=== "<5>"
=== "<6>"
=== "<7>"
=== "<8>"
=== "<9>"
=== "<10>"
=== "<11>"
=== "<12>"
=== "<13>"
=== "<14>"
空间优化
由于每个状态都只与其上一行的状态有关,因此我们可以使用两个数组滚动前进,将空间复杂度从 O(n^2) 将低至 O(n) 。
进一步思考,我们是否可以仅用一个数组实现空间优化呢?观察可知,每个状态都是由正上方或左上方的格子转移过来的。假设只有一个数组,当开始遍历第 i 行时,该数组存储的仍然是第 i-1 行的状态。
- 如果采取正序遍历,那么遍历到
dp[i, j]时,左上方dp[i-1, 1]~dp[i-1, j-1]值可能已经被覆盖,此时就无法得到正确的状态转移结果。 - 如果采取倒序遍历,则不会发生覆盖问题,状态转移可以正确进行。
下图展示了在单个数组下从第 i = 1 行转换至第 i = 2 行的过程。请思考正序遍历和倒序遍历的区别。
=== "<1>"

=== "<2>"

=== "<3>"

=== "<4>"

=== "<5>"

=== "<6>"

在代码实现中,我们仅需将数组 dp 的第一维 i 直接删除,并且把内循环更改为倒序遍历即可。
=== "Java"
```java title="knapsack.java"
[class]{knapsack}-[func]{knapsackDPComp}
```
=== "C++"
```cpp title="knapsack.cpp"
[class]{}-[func]{knapsackDPComp}
```
=== "Python"
```python title="knapsack.py"
[class]{}-[func]{knapsack_dp_comp}
```
=== "Go"
```go title="knapsack.go"
[class]{}-[func]{knapsackDPComp}
```
=== "JS"
```javascript title="knapsack.js"
[class]{}-[func]{knapsackDPComp}
```
=== "TS"
```typescript title="knapsack.ts"
[class]{}-[func]{knapsackDPComp}
```
=== "C"
```c title="knapsack.c"
[class]{}-[func]{knapsackDPComp}
```
=== "C#"
```csharp title="knapsack.cs"
[class]{knapsack}-[func]{knapsackDPComp}
```
=== "Swift"
```swift title="knapsack.swift"
[class]{}-[func]{knapsackDPComp}
```
=== "Zig"
```zig title="knapsack.zig"
[class]{}-[func]{knapsackDPComp}
```
=== "Dart"
```dart title="knapsack.dart"
[class]{}-[func]{knapsackDPComp}
```
=== "Rust"
```rust title="knapsack.rs"
[class]{}-[func]{knapsack_dp_comp}
```